Fokus-Rollout 2025
Impressionen vom Fokus-Rollout am 28. Mai 2025
-

Plakat vor dem LEE-Gebäude -

Projekt ASIRA -

Projekt ASIRA -

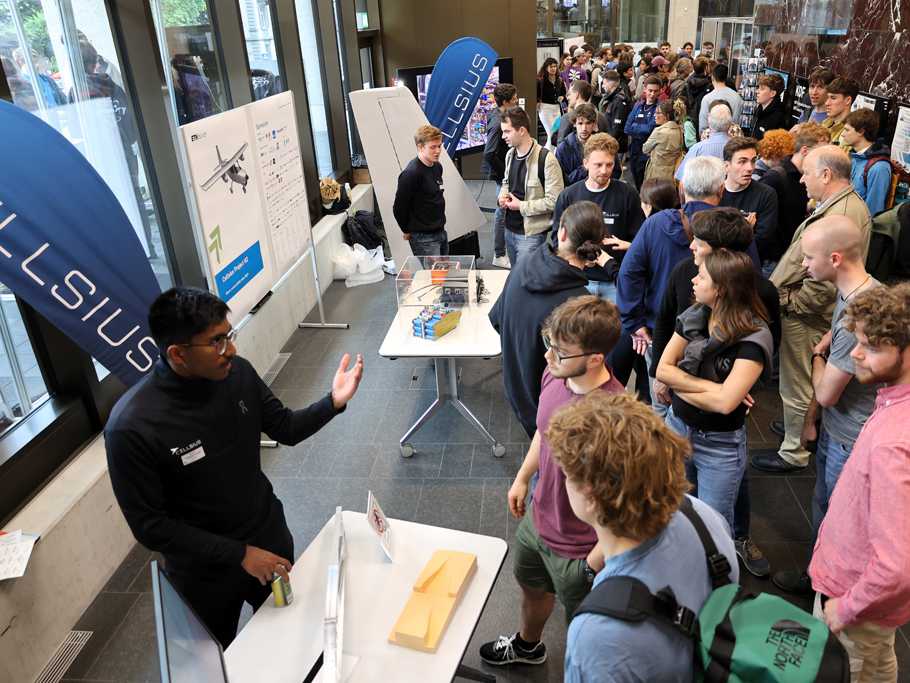
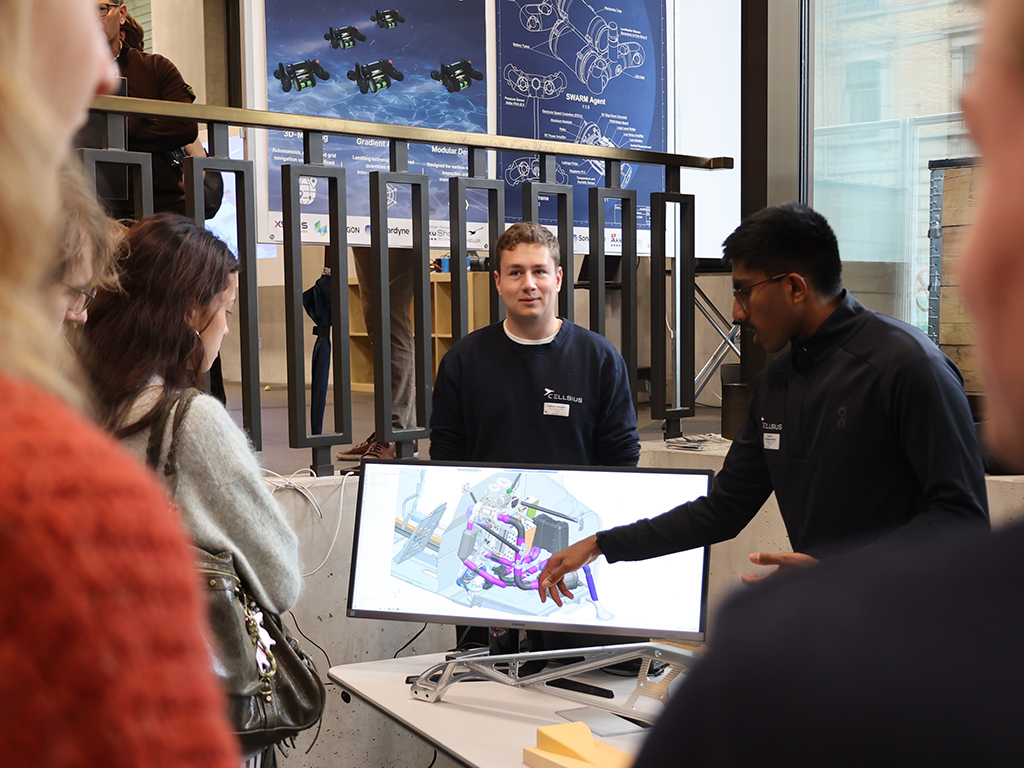
CELLSIUS Projekt H2 -

CELLSIUS Projekt H2 -

Projekt SERENITY -

Projekt SERENITY -

Projekt ARGOS -

Projekt ARGOS -

Projekt ARGOS -

Projekt HEPHAESTUS (ARIS) -

Projekt HEPHAESTUS (ARIS) -

Formula Student Electric (AMZ) -

Projekt Formula Student Electric -

Projekt MONKEE -

Projekt MONKEE -

Projekt Swissloop -

Projekt Swissloop -

Projekt SWARM -

Projekt SWARM -

Projekt ReefRanger -

Projekt ReefRanger -

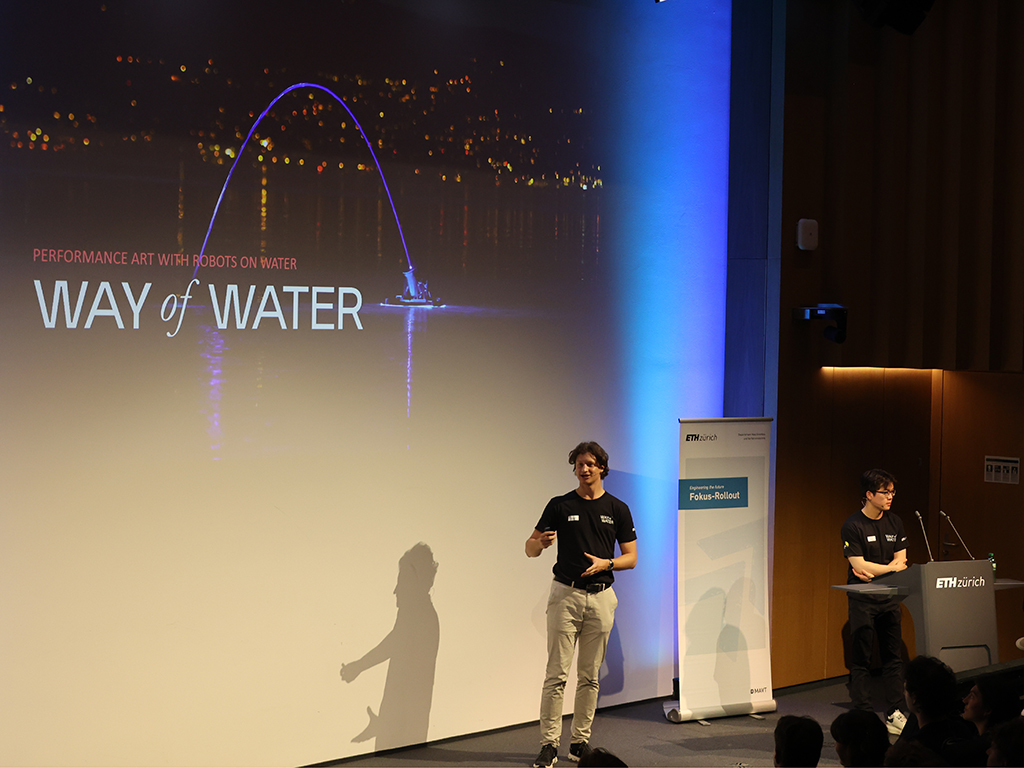
Projekt Way of Water -

Projekt Way of Water -

Im Audi Max

















Fokus-Projekte 2024/25
Ziel des Fokus-Projekts «ARGOS» ist es, ein Käfigsystem für Labormäuse zu entwickeln, das den aktuellen Tierschutzstandards und modernsten Überwachungsanforderungen entspricht. Die Studierenden entwickeln ein hochintegriertes mechatronisches System, das die Aktivität der Mäuse sowie verschiedene Tierwohlaspekte wie Wasser und Futter in Echtzeit überwacht. Dabei arbeitet das Team mit Experten aus den Neurowissenschaften, der Ethik, dem Tierschutz, der Veterinärmedizin und dem ETH AI Center zusammen.
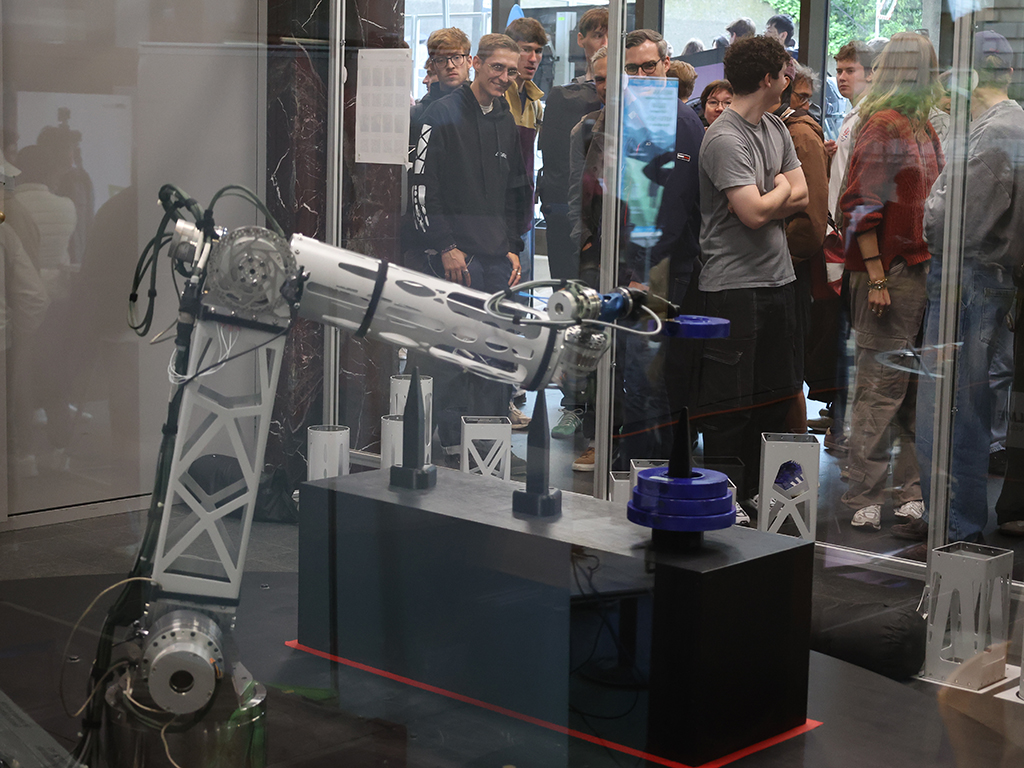
Das Projekt «Modular Evolving Industrial Robots» zielt darauf ab, einen neuartigen Industrieroboter zu entwickeln, der speziell auf die Anforderungen moderner Industrieumgebungen mit kurzen Einsatzphasen und häufig wechselnden Automatisierungsaufgaben abgestimmt ist. Herkömmliche Roboter sind meist für langfristige, sich wiederholende Aufgaben ausgelegt. Zudem fehlt es bestehenden Robotik-Plattformen an Flexibilität, um Gelenkzahl oder Verbindungskonfigurationen an unterschiedliche Anforderungen anzupassen. Im Fokus-Projekt entsteht daher ein modularer Industrieroboter, der mithilfe algorithmischer Optimierung seine Geometrie flexibel anpassen und spezifische Aufgaben energieeffizient ausführen kann.
Website: asira.ethz.ch
Im Projekt CELLSIUS H2 wird ein wasserstoffbetriebener Antriebsstrang in ein Leichtflugzeug des südafrikanischen Herstellers Sling integriert. Ziel ist es, mit dem Zweisitzer die Alpen zu überqueren. Das Team entwickelt alle mechanischen Komponenten, wobei der Fokus auf Leichtbau liegt. Aufbauend auf den Arbeiten früherer Teams wollen die Studierenden die Aerodynamik optimieren, ein Kühlsystem konzipieren und neue Halterungen für den Wasserstofftank implementieren. Ausserdem entwickeln und testen sie das Regelsystem und den Antriebsstrang, um die behördliche Zulassung sicherzustellen.
Website: externe Seite cellsius.aero
Im Fokus-Projekt «Formula Student Electric» konstruieren Studierende des Akademischen Motorsportvereins Zürich (AMZ) einen vollelektrischen Rennwagen, der sowohl von einem Menschen gesteuert als auch autonom fahren kann. Kriterien der Entwicklungsarbeit sind Zuverlässigkeit, Leistungsfähigkeit und Leichtbau. Zu den wichtigsten technischen Aufgaben gehören die Entwicklung des Fahrgestells, der aerodynamischen Komponenten und des Aufhängungssystems. Ziel des Teams ist es, an der internationalen Formula Student-Meisterschaft teilzunehmen.
Website: externe Seite amzracing.ch/de
Ziel des Projekts HEPHAESTUS ist die Entwicklung, Herstellung und Erprobung eines Raketentriebwerks. Aufbauend auf früheren Projekten soll ein gewichtsoptimiertes und kompaktes Triebwerk entwickelt werden, das den Schub von 700 N auf 4-5 kN erhöht. Das Triebwerk soll in eine Rakete integriert werden können, mit dem Ziel an der European Rocketry Challenge teilzunehmen. Um Effizienz und hohe Leistung zu erreichen, wird das Team eng mit Industriepartnern zusammenarbeiten und das Triebwerksdesign in iterativen Tests validieren.
Website: externe Seite aris-space.ch/our-projects/hephaestus-2025
Im Fokus-Projekt «MONKEE» entwickelt das Team einen Kletterroboter, der neue Möglichkeiten für die Baumkronenforschung eröffnet. Der Roboter kann bis tief ins Innere der Baumkrone vordringen. Die modulare Plattform ist für unterschiedliche Forschungsaufgaben geeignet, beispielsweise für CO₂-Messungen, Probensammlungen oder die Platzierung von Sensoren. Mit der Technologie kann ein Beitrag zum Verständnis des Klimas und zum Erhalt der Artenvielfalt geleistet werden.
Website: monkee.ethz.ch
Im Rahmen des «ReefRanger»-Projekts wird ein autonomer Unterwasserroboter entwickelt. Er übernimmt die zeit- und arbeitsintensive Arbeit von Tauchern bei der Pflege von Korallenfarmen und macht den Prozess skalierbar. Der Roboter erkennt die Korallen, steuert sie präzise an und versorgt sie gezielt mit Nährstoffen. Durch sein weiches und flexibles Design kann sich der Roboter an die Umgebung anpassen und die empfindlichen Korallen schützen. Mit moderner Antriebstechnik, Bildverarbeitung und maschinellem Lernen erledigt er seine Aufgaben autonom. Das Projekt nutzt innovative Technologien zur Verbesserung der Riffwiederherstellung. Es trägt zum Schutz der Meeresökosysteme bei und unterstützt die Ziele der Vereinten Nationen für nachhaltige Entwicklung 13 (Climate Action) und 14 (Life Below Water).
Website: reefranger.ethz.ch
Im Projekt «Serenity» entsteht ein robuster, leichter Erkundungsroboter für planetarische Missionen. Die Aufgaben umfassen Materialauswahl, Design, Mechatronik, Antrieb, Sensorik und Computer-Vision. Um sich im anspruchsvollen Mondgelände und insbesondere in Lavaröhren fortzubewegen, wird der Roboter omnidirektionale Federstrukturen, Sprungmechanismen und eine KI-basierte Steuerung einsetzen. Ein innovativer Ansatz für Fortbewegung und Aufpralldämpfung ermöglicht es dem Roboter, mehrere Stürze aus großer Höhe zu überstehen und so die Navigation in den komplexen Höhlensystemen zu meistern. Vor Ort wird er mithilfe von Lidar und Computer-Vision die Tunnelsysteme kartieren und Daten zur Gaskomposition sammeln.
Website: serenity.ethz.ch
Im Projekt «Underwater Swarm Robotics« entwickelt das Fokus-Team einen Schwarm autonomer Unterwasserroboter, die in Schweizer Seen 3D-Daten erfassen und kartieren können. In Zusammenarbeit mit dem Schweizer Wasserforschungsinstitut Eawag untersucht das Fokus-Team im Genfersee die Ausbreitung von antibiotikaresistenten Bakterien und deren Auswirkungen auf die Umwelt. Das innovative Robotersystem integriert drahtlose Kommunikation, beherrscht die Unterwasserlokalisierung ohne GPS und nutzt hochentwickelte Algorithmen zur effizienten Koordination der Fortbewegung.
Website: externe Seite aris-space.ch/our-projects/aris-swarm
Im Swissloop-Projekt wird jährlich ein neuer Prototyp des Hyperloop-Transportsystems entwickelt und getestet. Im Mittelpunkt des CO₂-neutralen Hochgeschwindigkeitssystems steht ein kapselartiges Fahrzeug, der „Pod”, das mit bis zu 1000 km/h durch eine nahezu luftleere Röhre gleitet. Mithilfe von Elektromagneten schwebt der Pod kontaktlos über den Schienen und umgeht somit neben dem Luft- auch dem Rollwiderstand. Für Antrieb und Schwebesystem müssen elektrotechnische, mechanische und elektromagnetische Lösungen implementiert werden. Die vakuumdichte Personenkapsel bildet die Grundstruktur des Pods. Mit 2,8 Metern Länge ist der diesjährige Prototyp in der Geschichte von Swissloop bisher am nächsten an der Anwendung. Zum Abschluss des Projektjahres tritt das Team bei der European Hyperloop Week (EHW) an, einem internationalen Wettbewerb.
Website: externe Seite swissloop.ch
Im Projekt «The Way of Water» wird ein Schwarm wasserbasierter Drohnen entwickelt, der mit verschiedenen Effekten ein einzigartiges Spektakel erzeugt. Ziel des Teams ist es, ein möglichst kostengünstiges, langlebiges und robustes System zu bauen, das für den Langzeiteinsatz geeignet ist. Ausserdem entwickeln die Studierenden einen spezialisierten Algorithmus, um die Drohnen im Schwarm zu steuern und zu koordinieren.
Website: https://wayofwater.ethz.ch
Was sind Fokus-Projekte?
Im fünften und sechsten Semester des Bachelorstudium können Studierende am D-MAVT ihr Wissen in sogenannten Fokus-Projekten vertiefen und praktisch anwenden. Ihre Aufgabe ist es, neue Technologieansätze aus der Forschung in zukunftweisende Produkte umsetzen. Ein Jahr lang haben die Studierendenteams Zeit, einen Prototyp zu entwickeln. Die Vielfalt der Themen ist gross – von Fertigungsverfahren, über Antriebssysteme für Fahr- und Flugzeuge bis zu Robotik oder Medizintechnik. Die Projektideen werden von Lehrenden und Studierenden gemeinsam erarbeitet, zum Teil in Zusammenarbeit mit Industriepartnern.
Neben den technischen Herausforderungen müssen die Studierenden das Arbeiten im Team meistern und Fähigkeiten entwickeln, die ihnen das Studium bisher nicht vermittelt hat. Sie durchlaufen gemeinsam den Prozess von der Projektidee über Designstudien bis zu Sponsorensuche und Produktion. Wie später im Berufsleben müssen sie unterschiedliche Probleme lösen, damit bis zum Ende des sechsten Semesters ein funktionsfähiger Prototyp entsteht. Zum Abschluss präsentieren die Studierenden das Ergebnis ihrer Arbeit beim Fokus-Rollout.
Artikel zu Fokus-Projekten
- Wenn Roboter Bäume hochklettern oder Korallenriffe retten
- ETH-Studierende entwickeln Drohnen, Roboter und Fahrzeuge
- Von Fischrobotern und künstlichen Muskeln
- Eine zeitgemässe Lösung für den Hydrozephalus
- Autonomes Gerät zur Wasseraufbereitung
- Drohne und Greifarm werden beste Freunde
- Neue Lösungen für die Zukunft
- Studierende stellen praktisches Können unter Beweis
- Elektrotöffs und springende Roboter für ferne Planeten