Focus Rollout
About Focus Projects
In the fifth and sixth semesters of their Bachelor's program, students at D-MAVT can deepen and apply their knowledge in so-called focus projects. Their task is to implement new technological approaches from research into future-oriented products. The student teams have one year to develop a prototype. The spectrum of topics is wide - ranging from manufacturing processes and drive systems for vehicles and aircraft to robotics and medical technology. The project ideas are developed jointly by teachers and students, sometimes in collaboration with industrial partners.
In addition to the technical challenges, the students have to master working in a team and develop skills that they have not yet acquired during their studies. They jointly go through the process from the project idea and design studies to finding sponsors and production. Just like later in their professional lives, they have to solve various problems in order to create a functional prototype by the end of the sixth semester. To round of their projects, the students present the results of their work at the Focus Rollout
Impressions from the Focus Rollout, 28 May 2025
-

Focus Rollout poster in front of the LEE building -

Project ASIRA -

Project ASIRA -

Project CELLSIUS H2 -
Project CELLSIUS H2 -

Project SERENITY -

Project SERENITY -

Project ARGOS -

Project ARGOS -

Project ARGOS -

Project HEPHAESTUS (ARIS) -

Project HEPHAESTUS (ARIS) -

Project Formula Student Electric (AMZ) -

Project Formula Student Electric (AMZ) -

Project MONKEE -

Project MONKEE -

Project Swissloop -

Project Swissloop -

Project SWARM -

Project SWARM -

Project ReefRanger -

Project ReefRanger -

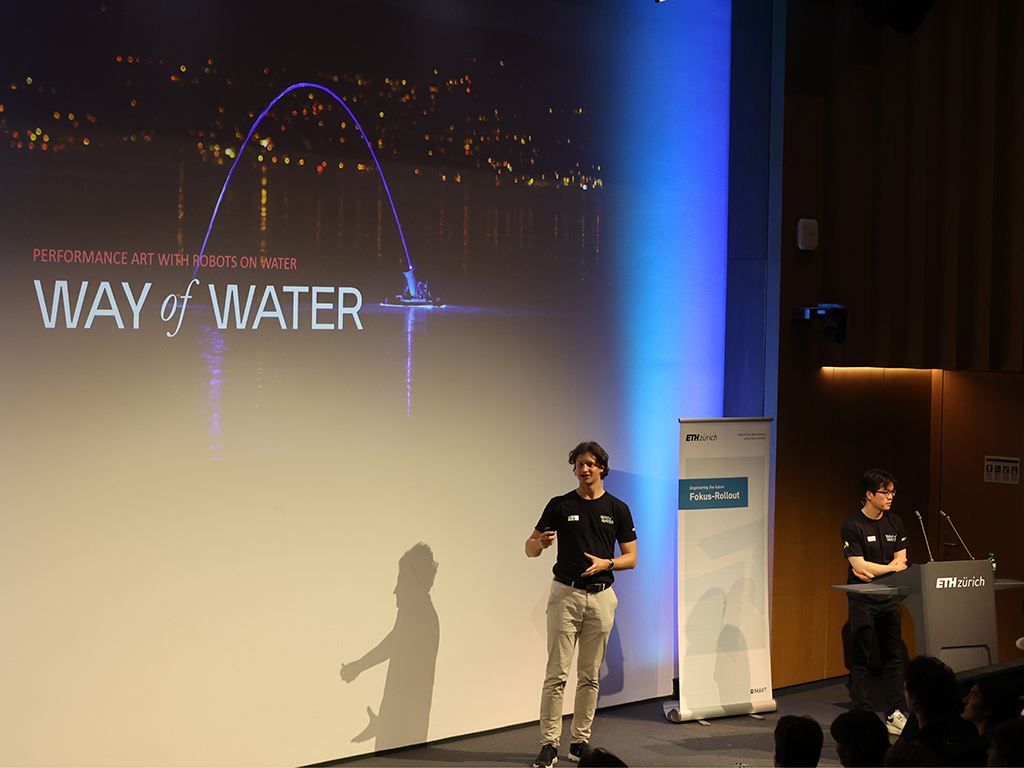
Project Way of Water -

Project Way of Water -

In the Audi Max

















Focus projects 2024/25
The aim of “ARGOS” is to develop a cage system for laboratory mice that complies with current animal welfare standards and state-of-the-art monitoring requirements. The students are developing a highly integrated mechatronic system that monitors the mouse's activity as well as different welfare aspects such as food and water in real time. The team is working together with experts from the fields of neuroscience, ethics, animal welfare, veterinary medicine and the ETH AI Center.
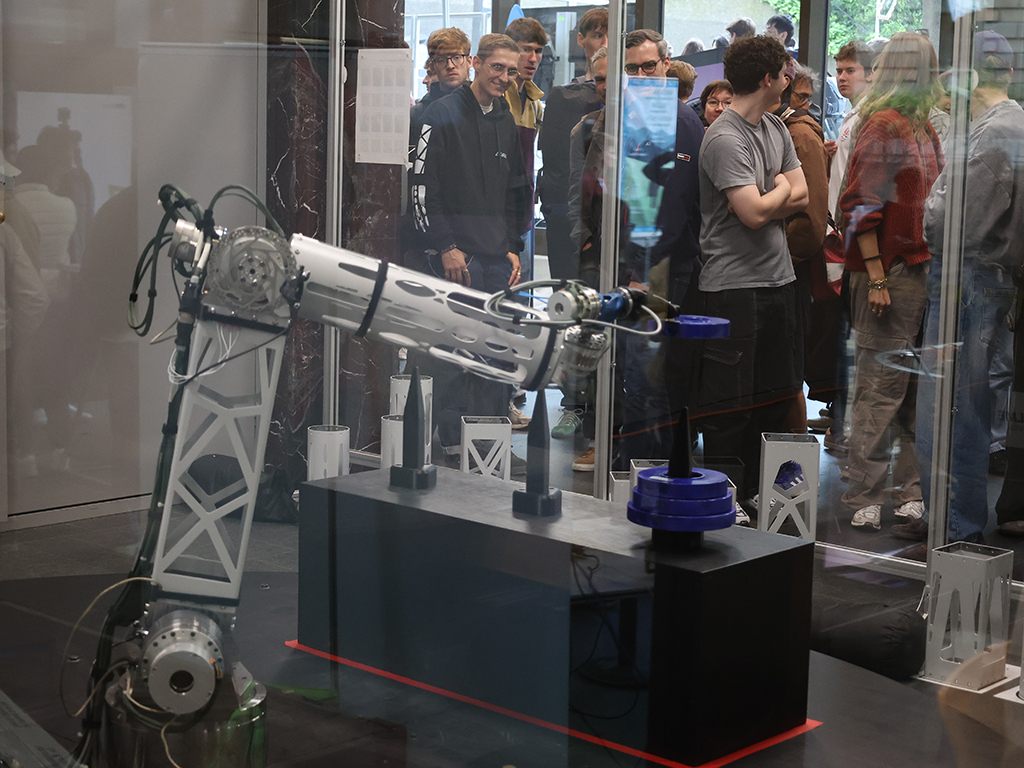
The aim of the “Modular Evolving Industrial Robots” project is to design a new type of industrial robot that meets the requirements of modern industrial environments with shorter deployment phases and rapidly changing automation tasks. Conventional robots are configured for long-term use and repetitive tasks. Existing robotic platforms lack the modularity to change the number of joints or the geometries of the connections for different requirements. The focus project aims to develop an industrial robot that can adapt its geometry to specific tasks through modularity and algorithmic optimization, enabling energy-efficient performance.
Website: asira.ethz.ch
In the CELLSIUS H2 project, a hydrogen-powered drive train is being integrated into a light aircraft from South African manufacturer Sling. The aim is to cross the Alps with the two-seater. The team is developing all the mechanical components, with a focus on lightweight construction. Building on the work of previous teams, the students want to optimize the aerodynamics, design a cooling system and implement new brackets for the hydrogen tank. They are also developing and testing the control system and drivetrain to ensure regulatory approval.
Website: external page cellsius.aero
In the “Formula Student Electric” focus project, students from the Academic Motorsport Association Zurich (AMZ) are designing an all-electric racing car that can be driven both by a human and autonomously. The criteria for the development work are reliability, performance and lightweight construction. The most important technical tasks include the development of the chassis, the aerodynamic components and the suspension system. The team's aim is to take part in the international Formula Student championship.external page
Website: external page amzracing.ch/en
The objective of the HEPHAESTUS project is to develop, manufacture and test a bi-liquid rocket engine. Building on previous projects, a weight-optimized and compact engine will be developed that increases the thrust from 700 N to 4-5 kN. It should be possible to integrate the engine into a sounding rocket with the goal of participating in the European Rocketry Challenge. To achieve efficiency and high performance, the team will work closely with industrial partners and validate the engine design through iterative testing.
Website: external page aris-space.ch/our-projects/hephaestus-2025
In the “MONKEE” focus project, the team is developing a climbing robot that opens new possibilities for treetop research. The robot can penetrate deep into the tree canopy. The modular platform is suitable for various research tasks, for example for CO₂ measurements, collecting samples or placing sensors. The technology can contribute to understanding the climate and preserving biodiversity.
Website: monkee.ethz.ch
The ReefRanger project is developing an autonomous underwater robot. It takes over the time-consuming and labor-intensive effort of divers in maintaining coral nurseries, making the process more scalable. The robot recognizes corals, navigates precisely to them and supplies them with nutrients in a targeted manner. Its soft and flexible design enables the robot to adapt to the environment and protect the sensitive corals. With modern drive technology, image processing and machine learning, it performs its tasks autonomously. The project uses innovative technology to improve reef restoration efforts. It contributes to the conservation of marine ecosystems and supports the United Nations Sustainable Development Goals 13(Climate Action) and 14(Life Below Water).
Website: reefranger.ethz.ch
The “Serenity” project is developing a robust, lightweight exploration robot for planetary missions. The tasks include material selection, design, mechatronics, drive, sensor technology and computer vision. The robot will be equipped with omnidirectional spring structures, jumping mechanisms and an AI-based control system to move around in challenging lunar terrain and especially in lava tubes. An innovative approach to locomotion and impact absorption will enable the robot to survive multiple falls from great heights and thus master navigation in the complex cave systems. On site, it will use lidar and computer vision to map the tunnel systems and collect data on gas composition.
Website: serenity.ethz.ch
In the “Underwater Swarm Robotics” project, the Fokus team is developing a swarm of autonomous underwater robots that can collect and map 3D data in Swiss lakes. In collaboration with the Swiss aquatic research institute Eawag, the Fokus team is investigating the spread of antibiotic-resistant bacteria and their impact on the environment in Lake Geneva. The innovative robotic system integrates wireless communication, masters underwater localization without GPS and uses highly developed algorithms to coordinate its movement efficiently.
Website: external page aris-space.ch/our-projects/aris-swarm
In the Swissloop project, a new prototype of the Hyperloop transportation system is developed and tested every year. At the heart of the CO₂-neutral high-speed system is a capsule-like vehicle, the “pod”, which glides through an almost airless tube at speeds of up to 1000 km/h. With the help of electromagnets, the pod hovers contactlessly above the rails, thus avoiding both air and rolling resistance. Electrotechnical, mechanical and electromagnetic solutions must be implemented for the drive and hovering system. The vacuum-tight passenger capsule forms the basic structure of the pod. With a length of 2.8 meters, this year's prototype is the closest to the application in the history of Swissloop. At the end of the project year, the team will compete in the European Hyperloop Week (EHW), an international competition.
Website: external page swissloop.ch
In "The Way of Water" project, a swarm of waterborne drones is being developed to create a unique spectacle using various effects. The team's aim is to build a system that is as cost-effective, durable and robust as possible and suitable for long-term use. The students are also developing a specialized algorithm to control and coordinate the drones in the swarm.
Website: https://wayofwater.ethz.ch
Articles on focus projects
- Robots that can climb trees or restore coral reefs
- ETH students develop drones, robots and vehicles
- From robotic fish to artificial muscles
- A state-of-the-art solution for hydrocephalus
- Autonomous water purification
- Drone and soft gripper become best friends
- New solutions for the future
- University projects for real world
- Students showcase their practical skills
- Electric motorbikes and jumping robots for distant planets